Land- und Forstwirtschaft
Autonome mobile Roboter (AMR)
Schwarmintelligenz
Wiederaufforstung
Off-Highway Robotik
FKZ 02WDG1760
ForestBots
Nachhaltige Schwarmintelligenz für die automatisierte Wiederaufforstung
Laufzeit: 01.11.2025 - 31.12.2027
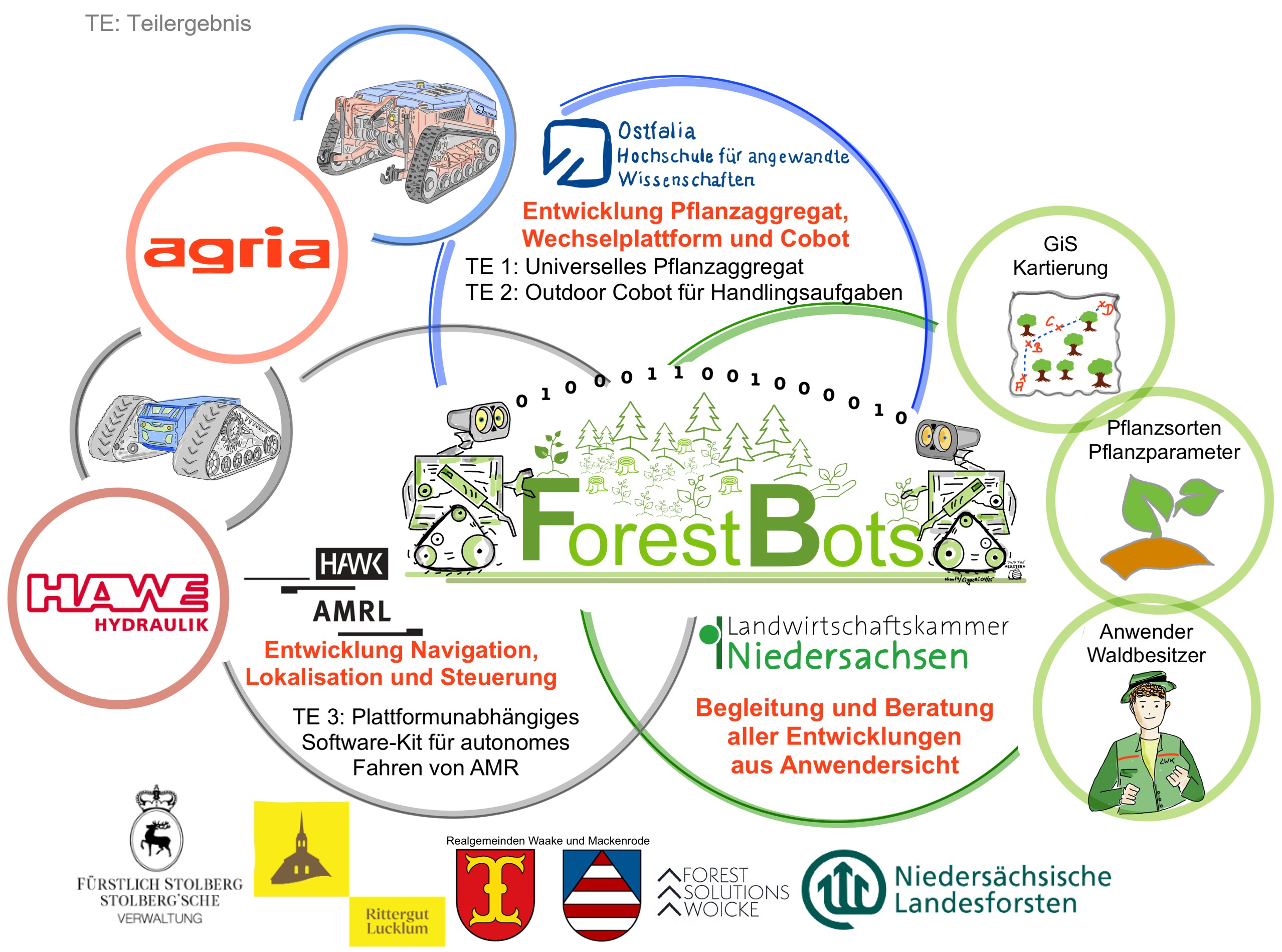
Konsortium:
- Ostfalia Hochschule für angewandte Wissenschaften
- Hochschule für angewandte Wissenschaft und Kunst (HAWK)
- Landwirtschaftskammer Niedersachsen
Ansprechpartner (Koordinator)
Prof. Dr. Andreas Ligocki
Ostfalia Hochschule für angewandte Wissenschaften
Salzdahlumer Straße 46/48
38302 Wolfenbüttel
Darum geht es im Projekt
Ein Kleinschwarm, bestehend aus zwei vollelektrischen, geländegängigen autonomen mobilen Robotern (kurz: AMR), soll in Kombination exemplarische forstliche Arbeitsprozesse im Wald automatisiert/teilautonom abbilden. Im Fokus steht hierbei als erster Use Case das Pflanzen von Setzlingen im Wald. Der AMR1 wird manuell durch einen Bediener per Funk über die zu kultivierende Fläche navigiert, um für den AMR2 eine Ersterkundung der komplexen Fahrumgebung vorzunehmen. Der AMR1 ist zusätzlich mit einem angepassten kollaborativen Industrieroboter als universelles Handling System sowie einem Spezialwerkzeug zum Pflanzen von Setzlingen ausgestattet. Der AMR1 verfügt überdies über Sensorik zur Selbstverortung und sendet neben seiner Position kontinuierlich Informationen wie Magazinfüllstand, Pflanztiefe, Pflanzposition und Bodenbeschaffenheit an eine zentrale Kommunikationsstelle.
Aufgabe des AMR2 ist es, das Pflanzmagazin des AMR1 fortlaufend teilautonom mit Pflanzmaterial aus einem zentralen Lager am Schonungsrand zu versorgen, wobei hier ein Mitarbeitender die Pflanzcontainer manuell zusammenstellt und aufsetzt. Der AMR2 fragt kontinuierlich die Füllmenge des Magazins und die Position des AMR1 über die Kommunikationsstelle ab, fährt den AMR1 bei Bedarf teilautonom an und pendelt somit als Shuttle zwischen beiden Arbeitsorten. Der AMR2 ist ebenfalls mit umfangreicher Sensorik ausgestattet und nutzt zur Navigation unter anderem a priori Wissen des AMR1 sowie zu entwickelnde Methoden zur autonomen Lokalisierung und Kartierung. Der Industrierobotes auf dem AMR1 übernimmt bei Ankunft die vollen Pflanzcontainer vom AMR2, setzt leere Container um und versorgt das Pflanzaggregat mit Setzlingen - ist somit für das gesamte Plattformhandling des AMR1 zuständig.
So stellt das Projekt ForestBots mit den bereits vorhandenen elektrischen AMR verschiedener Hersteller, die künftig kollaborativ als Schwarm in einem roboter-feindlichen Umfeld agieren, eine einzigartige Kombination dar.